Mesin Testing

1 .1 Fitur
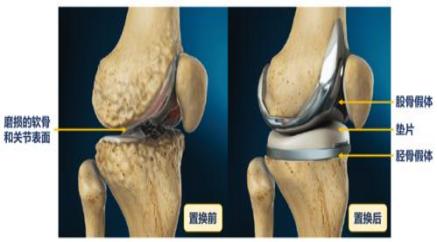
Penguji nyandhang sendi lutut HK 3 kasusun saka telung bagean: host test, perlengkapan, lan bagean kontrol elektronik. Bisa simulasi nyandhang, lemes lan peeling saka implan dhengkul lan pangolahan karusakan liyane, lan bisa nyoba 3 joints dhengkul ing wektu sing padha Implants. Mesin tes iki kanthi otomatis ngontrol pasukan tes, wektu tes lan kacepetan, lan ngukur kekuatan tes lan torsi kanthi nyata. Iki ditrapake kanggo nggawe, nggunakake lan riset prostesis sendi lutut lan lapangan medis liyane sing gegandhengan.
Drive kumparan adopts diimpor AC servo motor lan sistem kontrol, kang bisa éling angger-angger kacepetan stepless lan dibutuhake Hitung torsi pancet / output pasukan sumbu pancet ing sawetara kacepetan; pasukan test Applied nggunakake sistem mbukak spring meneng. Pasukan tes ditrapake kanthi ajeg lan andal, lan pasukan tes bisa disetel dening operator ing antarmuka komputer; kacepetan spindle, Paramèter kayata nomer révolusi, pasukan test, lan wektu test kabeh kontrol dening komputer, kang bisa ngumpulake data test ing wektu nyata lan plot mau. Kurva test sing cocog bisa digawe, lan data test utawa kurva bisa disimpen, dijupuk lan dicithak ing bakal.
Sistem pemuatan motor servo telung arah kanthi macem-macem komponen kanggo AP gabungan lengkap, rotasi, fleksi Abduksi lan gerakan liyane, modul sensor gaya papat komponen nguji gaya aksial torsi, dorongan horisontal lan fleksi masing-masing Torsi sajrone ekstensi , Déwan servo telung cara sing dilengkapi encoder rotary tliti dhuwur, pangukuran sudut wektu nyata, lan pamindahan lan nyedhiyakake sumber data sing efektif kanggo kontrol komputer inang.
Saben mekanisme gerakan dikontrol lan dikoordinasi kanthi mandiri, kanthi telung stasiun lan 15 sumbu kanggo ngrampungake uji karusakan komponen gabungan.
1.2 Spesifikasi Utama
1. Piranti lunak operasi instrumen kanthi antarmuka operasi Cina.
2. Piranti lunak piranti sing mlaku wis siyap digunakake, ora mbutuhake piranti lunak khusus.
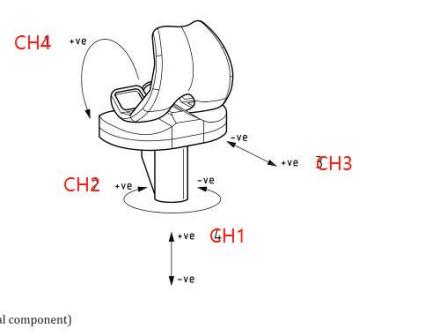
3. Derajat kebebasan: Saben stasiun tes bisa mujudake fleksi / ekstensi, rotasi internal / rotasi eksternal, gerakan maju / mundur, kontrol gerakan telung dimensi, lan beban aksial, lan saben derajat kebebasan bisa dikontrol. Loro sensor lan pasukan dideteksi; gerakan bebas ing arah mlebu / metu lan arah mlebu / metu bisa.
4. Nonlinearity sensor ora luwih saka 0,10% saka skala lengkap, lan hysteresis ora luwih saka 0, 10%, repeatability ora luwih saka 0,05% saka ukuran lengkap.
5. Range sensor pamindhahan lan pamindhahan: pamindahan aksial 100mm, fleksi/ekstensi 120, rotasi internal/Rotasi eksternal 20, pamindahan anterior / posterior 15mm, pamindahan medial / lateral 5mm, inversi 5mm.
6. Kapasitas beban lan rentang sensor gaya: beban aksial 3KN, torsi internal / eksternal 20Nm, Beban maju / mundur 1KN.
7. Akurasi kontrol pasukan lan pamindahan: Kesalahan gaya lan amplitudo pamindahan ing siji siklus ora ngluwihi maksimum sing ditemtokake. Kesalahan fase maksimum ora ngluwihi 3% saka siklus lengkap. Instrumen kasebut diuji miturut ISO 14243-1 lan ISO 14243-3 ing saben tingkat kebebasan sing bisa dikontrol. Kurva sing diukur lan nilai panyimpangan saka gaya lan sensor pamindahan.
8. Nduwe fungsi input analog wolung saluran lan bisa disinkronake karo data eksternal.
9. Frekuensi tes: 1Hz, akurasi 0.1Hz.
10. Sistem kontrol: Sampeyan kudu dilengkapi karo multi-stasiun, multi-saluran servo controller kapisah kanggo entuk kontrol otomatis tutup-loop saka pasukan lan pamindahan.
11. Pengontrol kudu bisa nindakake kompensasi kontrol nilai puncak-kanggo-lembah kanggo mesthekake yen nilai puncak sing dibutuhake sinyal bisa digayuh kanthi akurat nalika bentuk gelombang siklik digunakake minangka instruksi kontrol.
12. Sampeyan kudu bisa ngleksanakake tes pemrograman kurva gaya mlaku khusus; bisa nindakake kontrol manual langkah-langkah kanggo saben derajat kebebasan sing bisa dikontrol; lan bisa ngekspor data mentah ing format Excel.
13. Sajrone tes, piranti lunak kudu bisa nggambarake gaya lan kurva pamindahan saben stasiun kanthi wektu nyata, lan sistem kontrol. Sistem kudu bisa nyetel kurva gerakan sampel kanthi otomatis supaya cocog karo kurva target tanpa intervensi manual.
14. Real-time tingkat kontrol loop tertutup ≤ 6kHz, kajaba kanggo pasukan lan mode kontrol pamindahan, controller kudu bisa kanggo Ngleksanakake mode kontrol variabel diwilang.
15. Frekuensi sampling digital ngirim ora kurang saka 100 kHz, lan cara sampling kudu kalebu: nilai puncak, nilai lembah, wektu wektu, maksimum, minimal, rata-rata , siklus / logaritma, lsp.
16. Nduwe mode dual, saluran umpan balik mbatesi mode kerja printah saluran.
17. Nduwe fungsi mriksa dhewe sensor eksitasi sing ilang .
18. Suhu: Suhu medium lubricating bisa dijaga ing (37 ℃) lan ana sistem kontrol suhu.
19. Medium pelumas : Lumahing sendi bisa dicemplungake ing medium pelumas, lan medium pelumas kudu disegel tanpa bocor; lan dilengkapi piranti ngawasi bocor.
20. Komponen tes: dilengkapi perkakas sing dibutuhake kanggo nguji, ngisi workstation lan loading kanggo kabeh gerakan.
21. Tombol mandeg darurat: Peralatan kudu dilengkapi tombol mandeg darurat.
22. Proteksi safety: Peralatan kudu dilengkapi tutup protèktif bahan polikarbonat termoplastik sing transparan lan transparan; Ana piranti interlock safety. Nalika lawang tutup protèktif dibukak, peralatan kudu bisa kanthi otomatis mungkasi testing.
1.3 Kondisi kerja
Ing suhu kamar Ing kisaran 10 ℃~ 35 ℃;
Kelembapan relatif ora luwih saka 80%;
Instalasi sing bener ing dhasar sing padhet;
Ing lingkungan sing resik tanpa geter, media korosif lan interferensi medan elektromagnetik sing kuwat;
Rentang fluktuasi voltase sumber daya ora ngluwihi voltase sing dirating  10%.
10%.
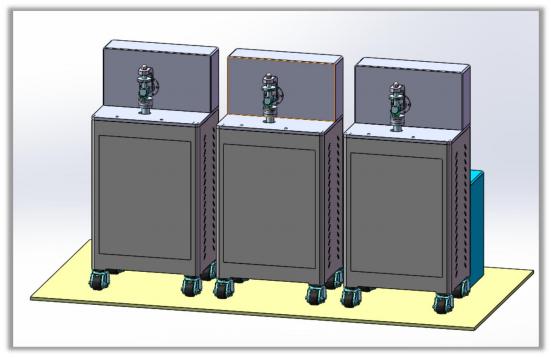
2. Komposisi struktur
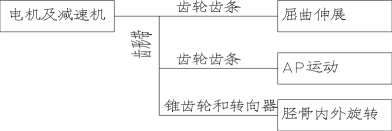
Mesin uji dipérang dadi telung stasiun kerja, yaiku sistem spindle drive, sistem muatan sampel, lan gaya aksial. Telung stasiun kerja kasebut nuduhake drive spindle sing padha. Sistem dinamis lan sistem kontrol piranti lunak.
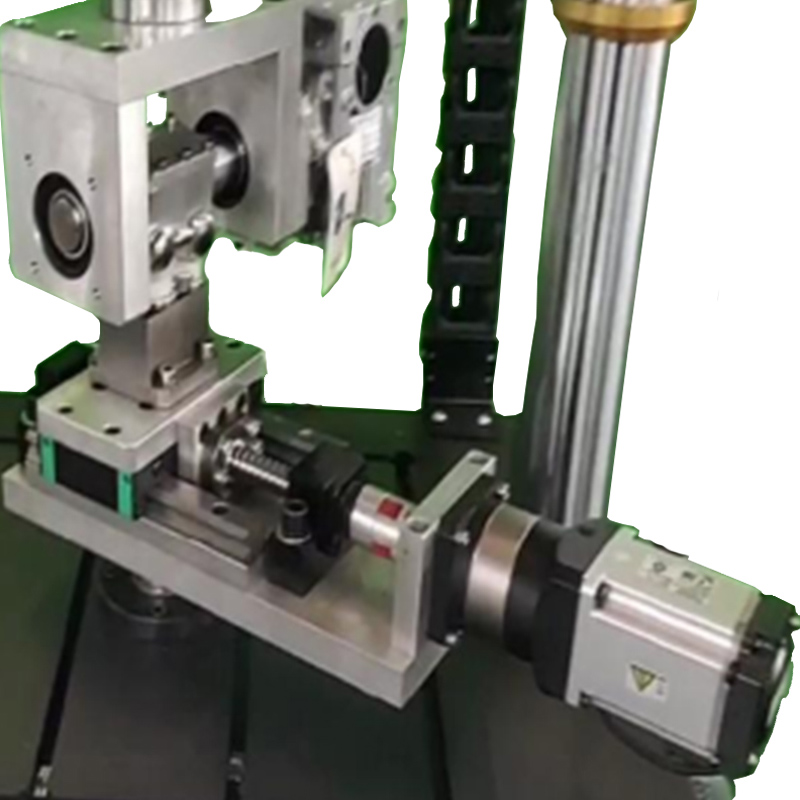
2.1 Sistem penggerak spindle
Motor sumbu nggunakake sistem kontrol kecepatan terintegrasi servo AC Panasonic lan motor. Daya motor maksimal yaiku 7,5 Kw, dayane dipérang dadi 3 garis output.
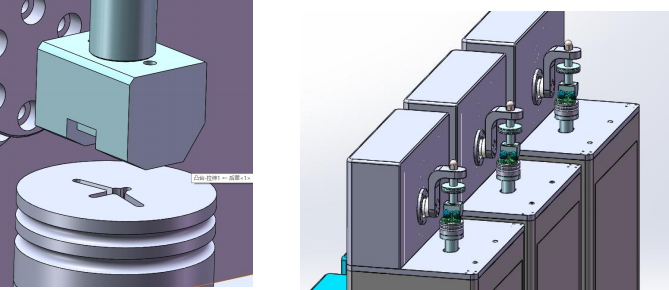
Kaping pisanan: Sawise rak gear, kopling elektromagnetik, lan sensor torsi, dadi pendulum puteran femur Kopling elektromagnetik tanggung jawab kanggo ngontrol daya lan mateni, lan sensor torsi tanggung jawab kanggo ngukur torsi. Ukur torsi sajrone operasi.
Kapindho: sawise ngliwati sabuk untu lan rak gear, dadi terjemahan bola-bali ngiwa lan nengen, nyopir sampel gerakan AP .
Sing nomer telu: liwat sabuk toothed , gear bevel lan gear setir, diowahi dadi ayunan rotasi tibia, nyopir sampel kanggo muter mlebu lan metu.
Rute transmisi ditampilake ing gambar ing ngisor iki.
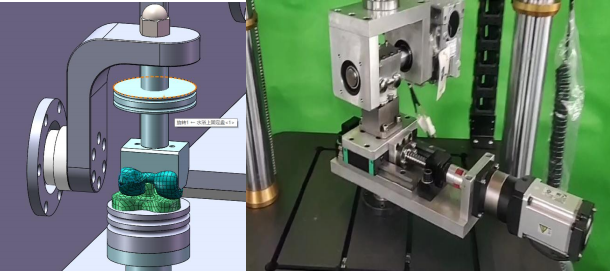
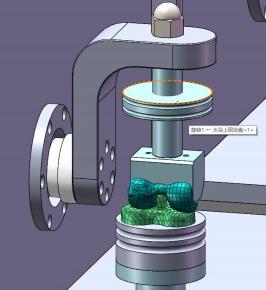
2.2 Sistem muat sampel
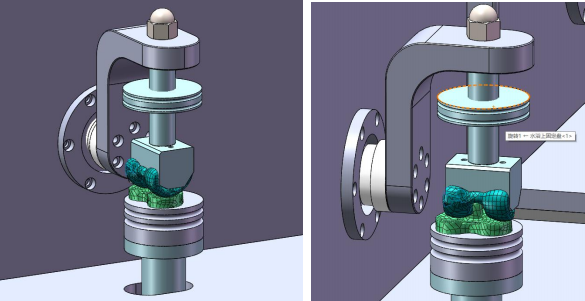
Sistem pemuatan spesimen nyimulasikake kebebasan gerakan ing kahanan manungsa kanggo komponen implan sendi lutut Dipasang lan didandani. Iki kalebu kursi sing dipasang, kursi geser, kursi nilon, rol, lengen geser, lsp.
Implementasine spesifik kaya ing ngisor iki:
Pamasangan perkakas nyandhang sendi lutut relatif rumit. Mangga nginstal strictly miturut diagram. Kajaba iku, saluran sing cocog dipasang.
Mangga gunakake nomer kabel sing cocog nalika nyambungake kabel.
(Struktur sing ditampilake ing gambar iki mung digunakake kanggo nduduhake prinsip gerakan, obyek sing nyata bakal menang)
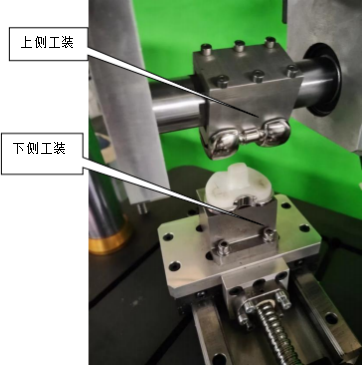

(Struktur sing ditampilake ing gambar iki mung digunakake kanggo nduduhake prinsip gerakan, obyek sing nyata bakal menang)
Sampeyan kudu ngolah maneh perkakas ndhuwur lan ngisor miturut sampel kanggo nyukupi syarat tes. (Saben ukuran produk Rincian beda-beda)

6. Pilihan saluran lan pangaturan sing gegandhengan
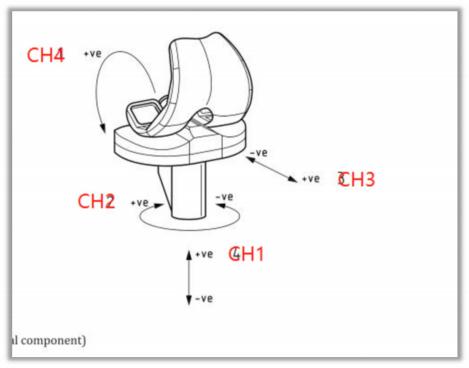
Digabungake karo gambar ing ndhuwur, priksa saluran sing bisa digunakake kanthi mriksa saluran kasebut. Nalika nglakokake ISO 14243.3, pilih lorong 1-4, Saluran 5 minangka saluran ekspansi kanggo upgrade sakteruse. Kanggo eksperimen sumbu siji utawa sumbu ganda liyane, pilih saluran sing cocog.
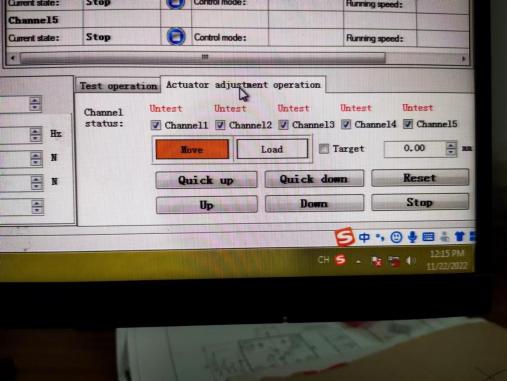
Cepet munggah/munggah = cepet loading/muat
Cepet mudhun/mudhun = Cepet mudhun/mudhun
0243368
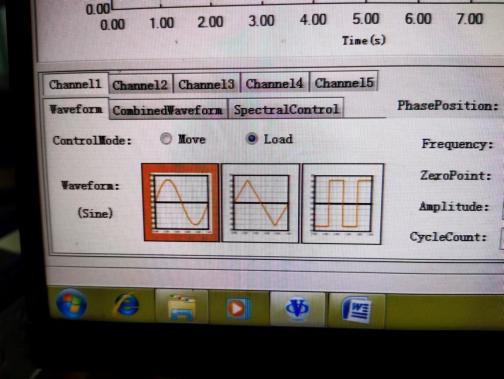
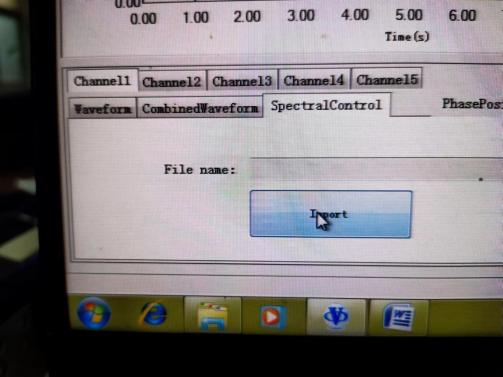
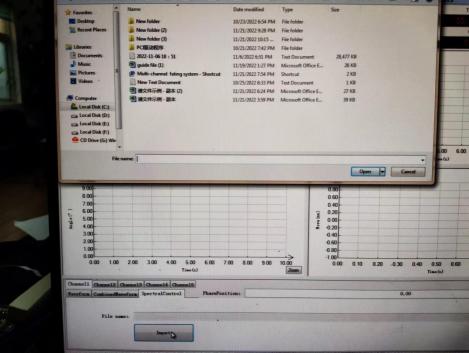
Pilih wangun gelombang prasetel pabrik. Yen sampeyan kudu nyetel wangun gelombang utawa tumindak anyar, sampeyan bisa nindakake ing file iki. Owahi lan simpen nganggo jeneng liya.
Kanggo pangaturan rinci kanggo saben saluran, waca manual piranti lunak saluran siji.
8. Babagan pangayoman:
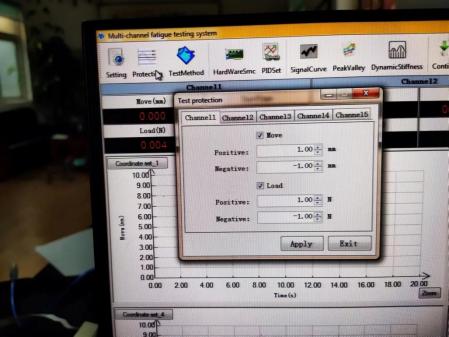
eksperimen ora obah utawa ora bisa ditindakake sawise ngeklik Mulai, priksa manawa ana paramèter sing ora toleransi ing opsi pangayoman.
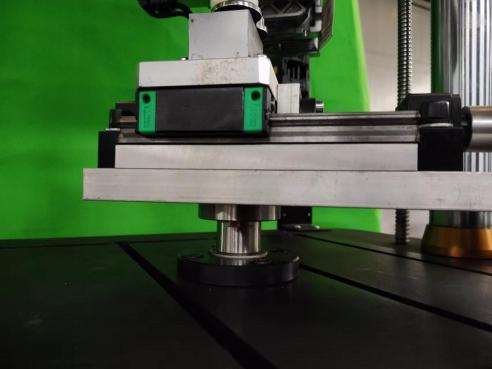
2.3 Sistem pemuatan gaya aksial
Mesin iki nganggo struktur pemuatan spring. Mekanisme loading didorong dening motor stepper, sing ditularake liwat sabuk toothed busur bunder, katrol sinkron lan pasangan sekrup bal presisi, lan dipandu dening rel guide gerakan linear presisi kanggo nyopir kursi aplikasi pasukan. Kursi gaya-applying tetep karo mekanisme spring-loaded, kang ditrapake pasukan kanggo platform ngusapake sawise spring wis teken. Kekuwatan tes ing antarane permukaan gesekan saka spesimen roller dibentuk. Kanthi ngontrol motor kanggo drive jog pasukan kanggo mindhah maju lan mundur ing papan, Sing, aplikasi lan gedhene pasukan test bisa kontrol. Sensor beban dipasang ing bidang kursi aplikasi pasukan. Nglumpukake sinyal pasukan. Pandhuan bantalan gerakan linier njamin aplikasi lan stabilitas gaya tes. Spring loading part Gampang kanggo mbukak lan mbongkar.
Nalika gaya tes wiwit mbukak, sensor bakal nglebokake tekanan prasetel menyang sistem kontrol mikrokomputer lan tekanan prasetel Komputer mikro banjur ngontrol motor kanggo mundur nganti tekanan sistem seimbang karo tekanan prasetel.
2.4 Load Soaking System
saka kothak cairan immersion, pemanas, sensor suhu, pompa peristaltik, tabung silikon, lsp.
Pelanggan bisa ngolah bolongan posisi ing permukaan mburi silinder miturut ukuran nyata sampel, lan sudut clamping bisa diatur. Sawise nyetel sudut, kunci panggeser posisi kiwa.
 {49098}
{49098}

 {4909}
{4909}
2.5 Sistem kontrol piranti lunak
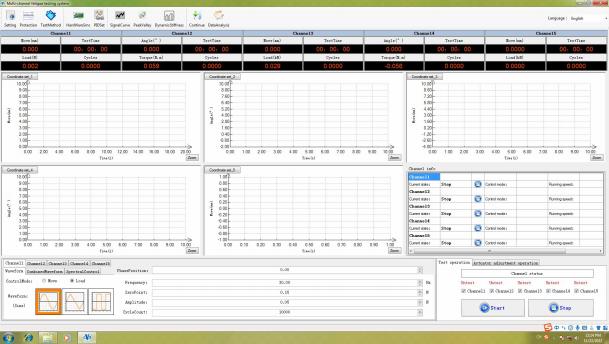
Sistem kontrol dipasang ing mesin kontrol lan disambungake menyang host test liwat kabel komunikasi. Lingkungan operasi piranti lunak yaiku WINDOWS XP. Piranti lunak kontrol minangka antarmuka operasi interaktif grafis, sing tanggung jawab kanggo ngirim instruksi kanggo ngontrol wiwitan lan mandheg sistem, kacepetan operasi, gaya muatan, suhu cairan kecemplung, lan ngumpulake data operasi sistem kayata gaya aksial, torsi, suhu, wektu tes. , lan liya-liyane sajrone tes. Sawise pitungan lan pangolahan, test pasukan-wektu, torsi-wektu lan kurva data liyane output ing wangun denah.
Digabungake karo gambar ing ndhuwur, priksa saluran kanggo konfirmasi saluran endi sing bisa digunakake. Nalika nglakokake ISO 14243.3, pilih 1-4 saluran, 5 t saluran iku saluran expansion kanggo upgrade sakteruse. Kanggo eksperimen sumbu siji utawa sumbu dobel liyane, pilih saluran sing cocog.
Cepet munggah/munggah = cepet loading/muat
Cepet mudhun/mudhun = cepet instal/copot instal
0243368
Pilih wangun gelombang sing wis digawe pabrik. Yen sampeyan kudu nyetel wangun gelombang utawa tumindak anyar, sampeyan bisa ngowahi ing file iki. Simpen ing jeneng liya.
Kanggo pangaturan rinci kanggo saben saluran, waca manual piranti lunak saluran siji.
8. Babagan pangayoman:
eksperimen ora obah utawa ora bisa ditindakake sawise ngeklik Mulai, priksa manawa ana paramèter sing ora toleransi ing opsi pangayoman.

 English
English
 Español
Español
 Português
Português
 русский
русский
 français
français
 日本語
日本語
 Deutsch
Deutsch
 Italiano
Italiano
 Nederlands
Nederlands
 ไทย
ไทย
 Polski
Polski
 한국어
한국어
 Svenska
Svenska
 magyar
magyar
 Malay
Malay
 বাংলা
বাংলা
 Dansk
Dansk
 Suomi
Suomi
 Pilipino
Pilipino
 Gaeilge
Gaeilge
 عربى
عربى
 norsk
norsk
 اردو
اردو
 čeština
čeština
 Ελληνικά
Ελληνικά
 Українська
Українська
 فارسی
فارسی
 தமிழ்
தமிழ்
 తెలుగు
తెలుగు
 नेपाली
नेपाली
 Burmese
Burmese
 български
български
 ລາວ
ລາວ
 Latine
Latine
 Қазақ
Қазақ
 Euskal
Euskal
 Azərbaycan
Azərbaycan
 slovenský
slovenský
 Македонски
Македонски
 Lietuvos
Lietuvos
 Eesti Keel
Eesti Keel
 Română
Română
 Slovenski
Slovenski
 मराठी
मराठी
 Српски
Српски
 עִברִית
עִברִית
 icelandic
icelandic
 Беларус
Беларус
 Монгол хэл
Монгол хэл
 Javanese
Javanese